















VIMS开发水下机器人协助石油泄漏清理


原型使用声波来帮助测量浮油的厚度
海上石油泄漏时,清理人员面临的一个巨大挑战——比如2010年墨西哥湾的“深水地平线”漏油事故——是确定涉及到多少石油。威廉玛丽大学弗吉尼亚海洋科学研究所的研究人员现在已经开发出一种远程操作的水下航行器,有朝一日可以在漏油事故的关键方面提供帮助。
项目负责人保罗·帕内塔(Paul Panetta)是应用研究协会(Applied Research Associates, Inc.)的科学家,也是VIMS的兼职教授。他说:“通常通过飞机和船只的视觉监控来测量泄漏的体积,以及表面浮油的范围和厚度,但这可能相当困难。我们的遥控潜水器(ROV)使用声学信号来帮助更容易地定位和聚焦于浮油最厚的部分。”
 随着石油勘探和开采进入北极水域,评估泄漏规模和数量的难度可能会增加,那里的冰层和恶劣天气可能会阻碍进入和能见度。帕内塔的工作经费来自美国内政部安全与环境执法局下属的溢油应急研究项目。该项目资助研究,以改善对北极泄漏的反应,并在新泽西州莱昂纳多运营260万加仑的欧姆塞特波浪箱,帕内塔的机器人最初是在那里制作原型的,现在将交付给欧姆塞特员工和其他研究团队使用。
随着石油勘探和开采进入北极水域,评估泄漏规模和数量的难度可能会增加,那里的冰层和恶劣天气可能会阻碍进入和能见度。帕内塔的工作经费来自美国内政部安全与环境执法局下属的溢油应急研究项目。该项目资助研究,以改善对北极泄漏的反应,并在新泽西州莱昂纳多运营260万加仑的欧姆塞特波浪箱,帕内塔的机器人最初是在那里制作原型的,现在将交付给欧姆塞特员工和其他研究团队使用。
Panetta说:“我们的ROV将测量Ohmsett实验浮油的厚度,以帮助开发和测试溢油响应工具。”“它还将为开发其他传感器和现场应用提供测试平台。这是开发海洋平台的第一步,该平台可以利用声学测量浮油厚度和其他石油特性。”
欧姆塞特储罐是官方的国家溢油应急研究设施。今天的许多石油泄漏清理产品和技术都是在那里开发和测试的。
声波浮油厚度ROV
由帕内塔和他的团队开发的ROV不是使用来自上方的视觉线索,而是通过从水下发射声波来测量浮油的厚度,这些声波会反射水与油、油与空气或油与冰之间的密度边界。通过测量接收到这些反射回波之间的轻微延迟,车辆的软件可以以非常精细的分辨率测量表面和冰下浮油的厚度——从厚度不到0.5毫米的浮油到厚达几厘米的浮油。
 深水浮油一度覆盖了28,958平方英里,即使是几毫米的油厚差异也会导致泄漏量的巨大差异。了解泄漏量是制定有效应对措施的关键因素,包括决定是否使用足够但不要过多的化学分散剂。
深水浮油一度覆盖了28,958平方英里,即使是几毫米的油厚差异也会导致泄漏量的巨大差异。了解泄漏量是制定有效应对措施的关键因素,包括决定是否使用足够但不要过多的化学分散剂。
与帕内塔合作开发ROV的是VIMS的访问科学家Dale McElhone,以及VIMS现场支持中心的John Oldfield和Wayne Reisner,他们帮助制造和设计了小型坦克式车辆。
除了在Ohmsett研究不同原油和精炼石油产品对车辆性能的影响外,该团队还在William & 玛丽的Adair游泳池(使用冰块)和VIMS的海水研究佳博体育的8,460加仑的水箱中对车辆进行了测试,在那里他们用硬塑料薄片代替冰,用菜籽油代替原油。
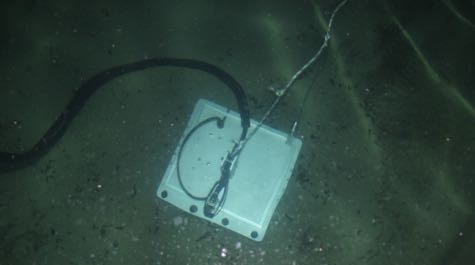
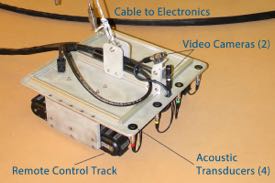
帕内塔说:“我们围绕防水的机动轨道建造了ROV。“这些设备的额定深度为100英尺,最高速度为每分钟32英尺,每个设备的拉力可达100磅。”轨道顶部是一个铝制平台,由Reisner和Oldfield手工制造,上面装有车辆的传感器:4个声波换能器,用于发送和接收声波,2个摄像头,用于帮助操作员安全有效地驾驶路线。
ROV还包含一个温度计。“声音在水和油中的传播速度随着温度的变化而变化,”帕内塔说。“因此,在使用声学信号确定浮油厚度时,了解温度是一个重要参数。”
ROV的主要电子设备安装在顶部的塑料外壳中。水下机器人通过约130英尺长的电缆与电子设备相连。控制电脑——一台带有操纵杆的笔记本电脑——通过Wi-Fi连接到电子设备上,这样操作员就可以在泳池甲板上操作电子设备——rov套件,或者在奥姆塞特水箱的实验中,在观察塔上操作。
 帕内塔说,最终的目标是继续改进这项技术,以便有一天它可以用来帮助应对公海上的实际泄漏。“我们已经想到了一些改进,”他说,“包括将视频流集成到ROV软件中,以实现更无缝的操作。我们还想建立一个不同类型石油的声学特性随温度变化的数据库。”
帕内塔说,最终的目标是继续改进这项技术,以便有一天它可以用来帮助应对公海上的实际泄漏。“我们已经想到了一些改进,”他说,“包括将视频流集成到ROV软件中,以实现更无缝的操作。我们还想建立一个不同类型石油的声学特性随温度变化的数据库。”
帕内塔说,该技术的未来迭代可能会将传感器安装在自主水下航行器或其他自由游泳平台上,以获得更大的灵活性和更广泛的覆盖范围。该设备的另一个潜在用途是横向发送声学信号,以计算海底井喷泄漏的石油量。确定“深水地平线”钻井平台海底井口泄漏的石油量是2010年灾难中最具挑战性的方面之一。
声学信号也可以用来确定泄漏中油滴的大小范围,这是化学分散剂应用是否有效的一种衡量标准。这是VIMS团队根据安全和环境执法局的相关合同一直在研究的课题。
